Our vision is to make cyber-physical systems and the Internet of Things (IoT) dependable and sustainable. To this end, we mostly follow a curiosity-driven research approach that aims to bridge theory and practice at the crossroads of embedded systems and wireless networking. Most of our projects involve analyzing and building real cyber-physical and IoT systems using concepts from diverse fields including distributed systems, real-time scheduling, embedded machine learning, and low-power hardware/software co-design. The following gives an overview of our main research areas.
Distributed battery-free systems: Making the Internet of Things sustainable
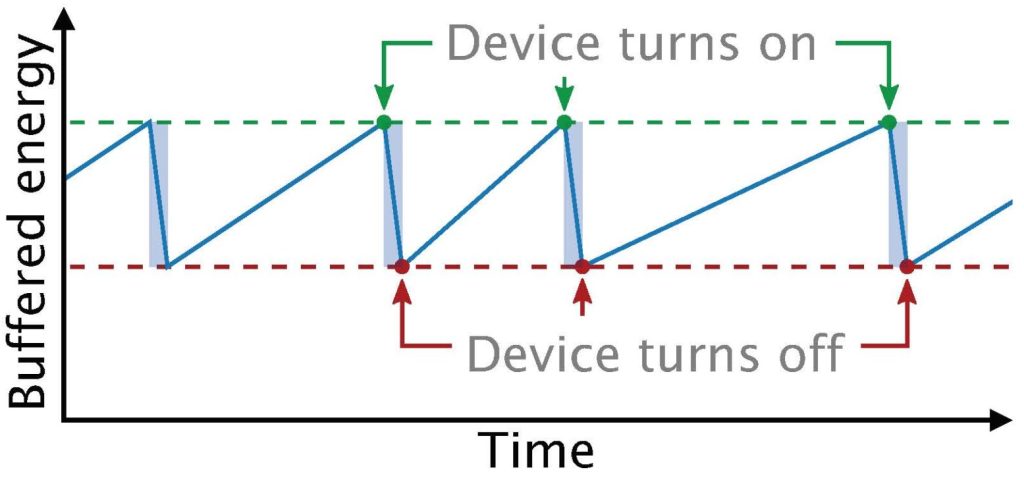
In an era of climate change and an ever-increasing demand for trillions of new IoT devices, ensuring the sustainability of the IoT is one of today’s grand challenges. Batteries are a major concern as they require maintenance and incur huge environmental costs. Battery-free devices promise a sustainable IoT by harvesting energy from renewable sources and using maintenance-free, eco-friendly capacitors as energy storage. Relying on volatile harvested energy, however, makes operation intermittent: the devices frequently lose power and need to recharge to resume operation. While it is by now well understood how to deal with these interruptions on a single device, it is still unclear how to communicate between and coordinate multiple battery-free, intermittently powered devices.
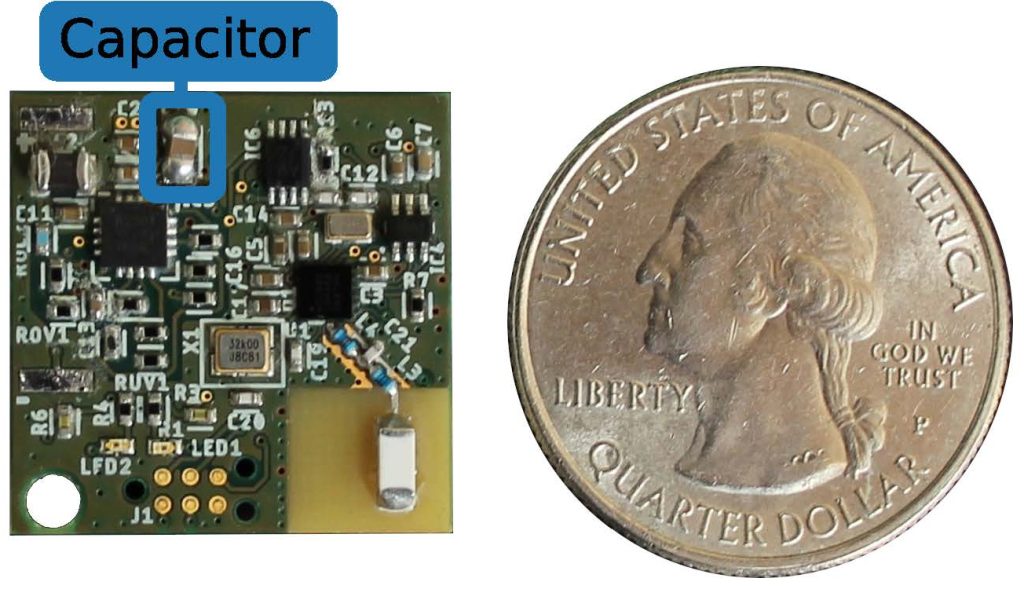
Our group has started to address this gap. We solved the two fundamental problems of neighbor discovery and synchronization in a distributed battery-free system. Using these solutions to bootstrap communication, we further developed Bonito, the first protocol that maintains a long-running connection between two battery-free devices against intermittency patterns that vary across time and space. To enable this research, we presented and open-sourced Shepherd, a tool that allows to gain unprecedented insights by recording and replaying harvesting power synchronously at high rate and resolution across many distributed battery-free devices. Based on these initial results and prototypes, as well as our research on energy management, we will continue working toward a truly sustainable IoT.
Synchronous transmissions: Embracing packet collisions
Most wireless protocols assume packet collisions are harmful. They, therefore, try to avoid collisions using complex mechanisms, such as scheduling to ensure that neighboring nodes transmit one after another over logical point-to-point links. The ability to avoid packet collisions relies on accurate, up-to-date knowledge of the network state (e.g., topology, link qualities). As the state of a wireless network changes quickly and unpredictably, however, this practice has led to brittle and inefficient protocols.
Our group has taken pioneering steps to understanding, improving, and exploiting synchronous transmissions, a disruptive concept that embraces packet collisions rather than trying to avoid them. We showed by purposely letting multiple nodes transmit at the same time it becomes possible to design wireless protocols whose logic is independent of the time-varying network state. This network state independence enables simpler protocol designs as well as unprecedented robustness and efficiency even in the face of significant network dynamics (e.g., due to node mobility).
A good starting point to learn more about synchronous transmissions is our recent survey of the growing number of protocols exploiting this concept. Glossy and Chaos are early communication primitives that made the concept popular. Mixer and Multi-Flow Glossy combine synchronous transmissions with different forms of network coding for efficient many-to-all communication. The Low-Power Wireless Bus is a full-fledged communication protocol that provides an abstraction akin to a wired bus (e.g., CAN, FlexRay). We have also exploited synchronous transmissions to create an efficient and reliable network-wide control channel, and have explored correlations between messages losses in theory and experiments, including the benefits for accurate yet tractable performance modeling.
End-to-end guarantees: Making wireless cyber-physical systems dependable
The ability to coordinate distributed sensors and actuators in a timely fashion is key to meeting the dependability requirements of cyber-physical systems (e.g., industrial automation and control). But fundamental end-to-end guarantees, such as the delivery of messages in a well-defined order or within hard real-time deadlines, were thought to be extremely difficult, if possible at all, to achieve across embedded wireless networks due to their scale, unpredictable dynamics, and constrained resources.
Together with our collaborators from ETH Zurich, Politecnico di Milano, and RWTH Aachen University, we have solved these long-standing research problems. Blink and Virtus exploit the abstraction of a wireless bus to provably provide real-time and virtual-synchrony guarantees. The Distributed Real-Time Protocol and the Time-Triggered Wireless Architecture lift the real-time guarantees from the level of network interfaces to the level of application tasks, such as sensing, control, and actuation.
Based on these fundamental end-to-end guarantees, we have also demonstrated for the first time closed-loop stability guarantees across wireless mesh networks for fast physical systems, such as mechanical systems with dynamics of tens of milliseconds found in industrial applications. In addition to formal proofs, we have validated our designs on several real experimental cyber-physical systems featuring multiple heterogeneous inverted pendulums as physical systems, as shown in the videos.
Our recent article provides an overview of the wireless control challenges and our co-design of control and communication to attack those challenges. Over the years, we have presented periodic designs focusing on stability guarantees while also providing runtime adaptability, as well as self-triggered and predictive triggering approaches focusing on saving resources and improving scalability. You may also check out our project website, which includes several pictures of a live demo at CPS-IoT Week 2019.
Reproducibility and benchmarking
The ability to rigorously compare different solutions and to faithfully reproduce experimental results is a prerequisite for establishing a scientific claim and advancing the state of the art. Unlike other research fields (e.g., databases or robotics), low-power wireless networking lacks well-defined benchmarks, and the uncontrolled variability of the evaluation environments (i.e., testbeds) makes it difficult to quantitatively compare and reproduce experimental results.
As a founding member of the IoTBench initiative, our group strives to remedy these issues by investigating benchmarks and evaluation methodologies. Together with our collaborators from ETH Zurich and TU Graz, we have developed the first systematic methodology for the design and analysis of reproducible performance evaluations. Using rigorous statistical methods, this methodology allows to make experimental claims that are reproducible with quantifiable confidence despite, for example, the dynamics of wireless links and ambient energy. We have implemented this methodology in a framework called TriScale. The TriScale website contains plenty of resources including source code, concrete examples, as well as material and recordings of tutorials held at several major scientific venues.